Go to the source code of this file.
Functions | |
| void | can_init (int argc, char *argv[], resmgr_connect_funcs_t *pconn, resmgr_io_funcs_t *pio, IOFUNC_ATTR_T *pattr) |
| int | can_set_filter (int fd, unsigned long id, unsigned long mask) |
| int | can_empty_queue (int fd) |
| int | can_arm (int fd, int channel_id) |
| int | can_read (intptr_t fd, unsigned long *id, char *extended, void *data, BYTE size) |
| int | can_write (intptr_t fd, unsigned long id, char extended, void *data, BYTE size) |
| int | can_send (int fd, j1939_pdu_typ *pdu) |
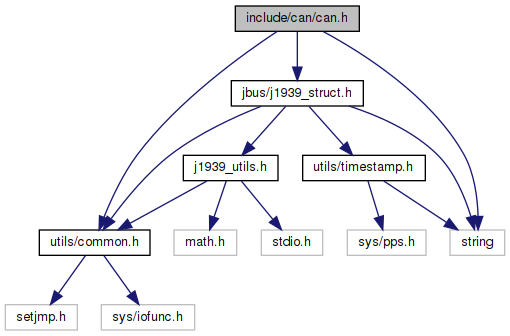
Detailed Description
This file contains utility methods needed to read and write messages to the Control Area Network (CAN) card.
- Version
- 1.0.0
- Date
- January 14, 2019
Function Documentation
◆ can_arm()
| int can_arm | ( | int | fd, |
| int | channel_id | ||
| ) |
Enable pulses from the CAN driver to the client process.
Pulses are waited for with MsgReceive or IP_Receive. Internal to the driver, done as part of open for read.
- Parameters
-
fd file descriptor for the location of the CAN card channel_id The ID of the channel that can be used to receive messages and pulses
- Returns
- EOK - Success.
EAGAIN - The devctl() command couldn't be completed because the device driver was in use by another process, or the driver was unable to carry out the request due to an outstanding command in progress.
EBADF - Invalid open file descriptor, filedes.
EINTR - The devctl() function was interrupted by a signal.
EINVAL - The device driver detected an error in dev_data_ptr or n_bytes.
EIO - The devctl() function couldn't complete because of a hardware error.
ENOSYS - The device doesn't support the dcmd command.
ENOTTY - The dcmd argument isn't a valid command for this device.
EPERM - The process doesn't have sufficient permission to carry out the requested command.
◆ can_empty_queue()
| int can_empty_queue | ( | int | fd | ) |
Empty the queue of messages in the CAN driver.
This is internal to the driver, and done as part of open for read
- Parameters
-
fd file descriptor for the location of the CAN card
- Returns
- number of messages that were dropped from the queue
◆ can_init()
| void can_init | ( | int | argc, |
| char * | argv[], | ||
| resmgr_connect_funcs_t * | pconn, | ||
| resmgr_io_funcs_t * | pio, | ||
| IOFUNC_ATTR_T * | pattr | ||
| ) |
Initialize the CAN driver.
This function is called from the main() during the initialization of the CAN driver to read the .ini file and initialize the can_info structure, and initialize the function tables.
Additional Arguments:
- -e: specifies extended frame
- -f: specifies whether to create a copy of pconfig (not modify the original)
- -i: interrupt request line
- -n: device name
- -p: port
- -s: bit speed
- -v: verbose
- Parameters
-
argc see additional arguments argv see additional arguments pconn table of the POSIX-level connect functions that are used by a resource manager. The open handle is updated to support opening the CAN card port pio table of the POSIX-level I/O functions that are used by a resource manager. The devctl handle is updated to support interrupt handling on the CAN card port pattr pointer to information per device manager
◆ can_read()
| int can_read | ( | intptr_t | fd, |
| unsigned long * | id, | ||
| char * | extended, | ||
| void * | data, | ||
| BYTE | size | ||
| ) |
Read information from the CAN card.
This message will update the ID, message format, and data field of a CAN message.
- Parameters
-
fd file descriptor for the location of the CAN card id CAN message format ID extended updated to be 1 if the identifier is in extended (29 bit) format, 0 if it is in the unextended (11 bit) format data the content of the data field. This element will be modified by this method. size number of bytes in the CAN data field
- Returns
- number of bytes in the data segment; -1 if error encountered
◆ can_send()
| int can_send | ( | int | fd, |
| j1939_pdu_typ * | pdu | ||
| ) |
FIXME (merge with can_write)
PATH CAN driver does not yet use state code or slot arguments, provided for compatibility with B&B STB converter send routine.
- Parameters
-
fd file descriptor that is used when sending the message pdu message to send
- Returns
- 0 on error, 1 on success.
◆ can_set_filter()
| int can_set_filter | ( | int | fd, |
| unsigned long | id, | ||
| unsigned long | mask | ||
| ) |
Set the CAN filter.
Internal to the driver, set as part of open for read
- Parameters
-
fd file descriptor for the location of the CAN card id CAN message format ID (standard or extended) mask requested filter mask
- Returns
- EOK - Success.
EAGAIN - The devctl() command couldn't be completed because the device driver was in use by another process, or the driver was unable to carry out the request due to an outstanding command in progress.
EBADF - Invalid open file descriptor, filedes.
EINTR - The devctl() function was interrupted by a signal.
EINVAL - The device driver detected an error in dev_data_ptr or n_bytes.
EIO - The devctl() function couldn't complete because of a hardware error.
ENOSYS - The device doesn't support the dcmd command.
ENOTTY - The dcmd argument isn't a valid command for this device.
EPERM - The process doesn't have sufficient permission to carry out the requested command.
◆ can_write()
| int can_write | ( | intptr_t | fd, |
| unsigned long | id, | ||
| char | extended, | ||
| void * | data, | ||
| BYTE | size | ||
| ) |
Write information to the CAN card.
- Parameters
-
fd file descriptor for the location of the CAN card id CAN device id on bus extended 0 for standard (11 bit) format, 1 for extended (29 bit) format data the content of the data field size number of bytes to be added to the data field
- Returns
- EOK - Success.
EAGAIN - The devctl() command couldn't be completed because the device driver was in use by another process, or the driver was unable to carry out the request due to an outstanding command in progress.
EBADF - Invalid open file descriptor, filedes.
EINTR - The devctl() function was interrupted by a signal.
EINVAL - The device driver detected an error in dev_data_ptr or n_bytes.
EIO - The devctl() function couldn't complete because of a hardware error.
ENOSYS - The device doesn't support the dcmd command.
ENOTTY - The dcmd argument isn't a valid command for this device.
EPERM - The process doesn't have sufficient permission to carry out the requested command.
