Go to the source code of this file.
Macros | |
| #define | PDU 0x00ff |
| #define | TSC1 0x0000 |
| #define | EXAC 0x000b |
| #define | RQST 0xea00 |
| #define | ERC1 0xf000 |
| #define | EBC1 0xf001 |
| #define | ETC1 0xf002 |
| #define | EEC2 0xf003 |
| #define | EEC1 0xf004 |
| #define | ETC2 0xf005 |
| #define | GFI2 0xfe81 |
| #define | EI 0xfe92 |
| #define | FD 0xfebd |
| #define | EBC2 0xfebf |
| #define | HRVD 0xfec1 |
| #define | TURBO 0xfedd |
| #define | EEC3 0xfedf |
| #define | VD 0xfee0 |
| #define | RCFG 0xfee1 |
| #define | TCFG 0xfee2 |
| #define | ECFG 0xfee3 |
| #define | ETEMP 0xfeee |
| #define | PTO 0xfef0 |
| #define | CCVS 0xfef1 |
| #define | LFE 0xfef2 |
| #define | AMBC 0xfef5 |
| #define | IEC 0xfef6 |
| #define | VEP 0xfef7 |
| #define | TF 0xfef8 |
| #define | RF 0xfefb |
| #define | J1939_RECEIVE_FATAL_ERROR -1 |
| #define | J1939_RECEIVE_MESSAGE_ERROR 0 |
| #define | J1939_RECEIVE_MESSAGE_VALID 1 |
| #define | BITS87(x) (((x) & 0xc0) >> 6) |
| #define | BITS65(x) (((x) & 0x30) >> 4) |
| #define | BITS43(x) (((x) & 0x0c) >> 2) |
| #define | BITS21(x) ((x) & 0x03) |
| #define | HINIBBLE(x) (((x) & 0xf0) >> 4) |
| #define | LONIBBLE(x) ((x) & 0x0f) |
| #define | HIBYTE(x) (((x) & 0xff00) >> 8) |
| #define | LOBYTE(x) ((x) & 0xff) |
| #define | TWOBYTES(x, y) ((((x) & 0xff) << 8) | (y & 0xff)) |
| #define | BYTE0(x) (((x) & 0xff)) |
| #define | BYTE1(x) (((x) & 0xff00) >> 8) |
| #define | BYTE2(x) (((x) & 0xff0000) >> 16) |
| #define | BYTE3(x) (((x) & 0xff000000) >> 24) |
| #define | FOURBYTES(a3, a2, a1, a0) |
Functions | |
| float | percent_0_to_100 (int data) |
| float | percent_0_to_250 (int data) |
| float | percent_m125_to_p125 (int data) |
| int | gear_m125_to_p125 (int data) |
| float | gear_ratio (int data) |
| float | pressure_0_to_4000kpa (int data) |
| float | pressure_0_to_1000kpa (int data) |
| float | pressure_0_to_500kpa (int data) |
| float | pressure_0_to_125kpa (int data) |
| float | pressure_0_to_12kpa (int data) |
| float | pressure_m250_to_p252kpa (int data) |
| float | rotor_speed_in_rpm (unsigned short data) |
| float | distance_in_km (unsigned int data) |
| float | hr_distance_in_km (unsigned int data) |
| float | speed_in_rpm_1byte (int data) |
| float | speed_in_rpm_2byte (int data) |
| float | wheel_based_mps (int data) |
| float | wheel_based_mps_relative (int data) |
| float | cruise_control_set_meters_per_sec (int data) |
| float | fuel_rate_cm3_per_sec (int data) |
| float | fuel_economy_meters_per_cm3 (int data) |
| float | torque_in_nm (unsigned short data) |
| float | time_0_to_25sec (BYTE data) |
| float | gain_in_kp (int data) |
| float | temp_m40_to_p210 (int data) |
| float | temp_m273_to_p1735 (int data) |
| float | current_m125_to_p125amp (int data) |
| float | current_0_to_250amp (int data) |
| float | voltage (int data) |
| float | brake_demand (int data) |
| float | mass_flow (int data) |
| float | power_in_kw (int data) |
Detailed Description
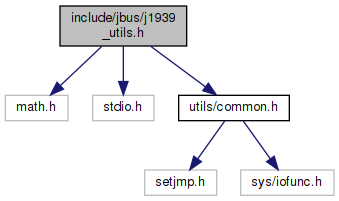
This file contains several constants, macros, and methods that are used when trying to interpret a J1939 message. This includes definitions of macros and constants needed to receive, convert and scale the fields in J1939 Protocol Data Units (frames).
Utility functions used when processing raw bit/byte data into message- specific units, as specified by Lane Assist Interface documentation.
Routines return out of range values to indicate errors. Application programs are responsible for checking that values are in range.
- Version
- 1.0.0
- Date
- May 31, 2018
Macro Definition Documentation
◆ AMBC
| #define AMBC 0xfef5 |
(254, 245) ambient conditions
◆ BITS21
| #define BITS21 | ( | x | ) | ((x) & 0x03) |
Extract bits 1 and 2 from a single byte.
◆ BITS43
| #define BITS43 | ( | x | ) | (((x) & 0x0c) >> 2) |
Extract bits 3 and 4 from a single byte.
◆ BITS65
| #define BITS65 | ( | x | ) | (((x) & 0x30) >> 4) |
Extract bits 5 and 6 from a single byte.
◆ BITS87
| #define BITS87 | ( | x | ) | (((x) & 0xc0) >> 6) |
Extract bits 7 and 8 from a single byte.
◆ BYTE0
| #define BYTE0 | ( | x | ) | (((x) & 0xff)) |
Extract the first byte from four bytes.
◆ BYTE1
| #define BYTE1 | ( | x | ) | (((x) & 0xff00) >> 8) |
Extract the second byte from four bytes.
◆ BYTE2
| #define BYTE2 | ( | x | ) | (((x) & 0xff0000) >> 16) |
Extract the third byte from four bytes.
◆ BYTE3
| #define BYTE3 | ( | x | ) | (((x) & 0xff000000) >> 24) |
Extract the fourth byte from four bytes.
◆ CCVS
| #define CCVS 0xfef1 |
(254, 241) cruise control vehicle speed
◆ EBC1
| #define EBC1 0xf001 |
(240, 1) electronic brake controller 1
◆ EBC2
| #define EBC2 0xfebf |
(254, 191) electronic brake controller 2
◆ ECFG
| #define ECFG 0xfee3 |
(254, 227) engine configuration
◆ EEC1
| #define EEC1 0xf004 |
(240, 4) electronic engine controller 1
◆ EEC2
| #define EEC2 0xf003 |
(240, 3) electronic engine controller 2
◆ EEC3
| #define EEC3 0xfedf |
(254, 223) electronic engine controller 3
◆ EI
| #define EI 0xfe92 |
(254, 146) engine information
◆ ERC1
| #define ERC1 0xf000 |
(240, 0) electronic retarder controller 1
◆ ETC1
| #define ETC1 0xf002 |
(240, 2) electronic transmission controller 1
◆ ETC2
| #define ETC2 0xf005 |
(240, 5) electronic transmission controller 1
◆ ETEMP
| #define ETEMP 0xfeee |
(254, 238) engine temperature
◆ EXAC
| #define EXAC 0x000b |
(0, 11) EXAC (WABCO proprietary)
◆ FD
| #define FD 0xfebd |
(254, 189) fan drive
◆ FOURBYTES
| #define FOURBYTES | ( | a3, | |
| a2, | |||
| a1, | |||
| a0 | |||
| ) |
Combine four bytes to a single value.
◆ GFI2
| #define GFI2 0xfe81 |
(254, 129) gaseous fuel information 2
◆ HIBYTE
| #define HIBYTE | ( | x | ) | (((x) & 0xff00) >> 8) |
Extract the high byte from two bytes.
◆ HINIBBLE
| #define HINIBBLE | ( | x | ) | (((x) & 0xf0) >> 4) |
Extract the high four bits from a single byte.
◆ HRVD
| #define HRVD 0xfec1 |
(254, 193) high resolution vehicle distance
◆ IEC
| #define IEC 0xfef6 |
(254, 246) inlet/exhaust conditions
◆ J1939_RECEIVE_FATAL_ERROR
| #define J1939_RECEIVE_FATAL_ERROR -1 |
Returned if the error should lead to deactivating the process.
◆ J1939_RECEIVE_MESSAGE_ERROR
| #define J1939_RECEIVE_MESSAGE_ERROR 0 |
Returned if an error message was received from the CAN card.
◆ J1939_RECEIVE_MESSAGE_VALID
| #define J1939_RECEIVE_MESSAGE_VALID 1 |
Returned if the message received from the CAN card is valid.
◆ LFE
| #define LFE 0xfef2 |
(254, 242) fuel economy
◆ LOBYTE
| #define LOBYTE | ( | x | ) | ((x) & 0xff) |
Extract the low byte from two bytes.
◆ LONIBBLE
| #define LONIBBLE | ( | x | ) | ((x) & 0x0f) |
Extract the high low bits from a single byte.
◆ PDU
| #define PDU 0x00ff |
(0, 255) sample undefined parameter group number
◆ PTO
| #define PTO 0xfef0 |
(254, 240) power takeoff
◆ RCFG
| #define RCFG 0xfee1 |
(254, 225) retarder configuration
◆ RF
| #define RF 0xfefb |
(254, 251) retarder fluids
◆ RQST
| #define RQST 0xea00 |
(234, 0) request transmission of a particular PGN
◆ TCFG
| #define TCFG 0xfee2 |
(254, 226) transmission configuration
◆ TF
| #define TF 0xfef8 |
(254, 248) transmission fluids
◆ TSC1
| #define TSC1 0x0000 |
(0, 0) Torque Speed Control 1, destination 0
◆ TURBO
| #define TURBO 0xfedd |
(254, 221) turbocharger
◆ TWOBYTES
| #define TWOBYTES | ( | x, | |
| y | |||
| ) | ((((x) & 0xff) << 8) | (y & 0xff)) |
Combine two bytes to a single value.
◆ VD
| #define VD 0xfee0 |
(254, 224) vehicle distance
◆ VEP
| #define VEP 0xfef7 |
(254, 247) vehicle electric power
Function Documentation
◆ brake_demand()
| float brake_demand | ( | int | data | ) |
Compute the break demand from input data bytes.
Values of byte from 251 to 255 indicate errors, returned. Range from 0 to 250 scale to -10 to 0 m/s^2.
This is used by EBC1-formated J1939 messages.
- Parameters
-
data one-byte value
- Returns
- break (m/s^2)
◆ cruise_control_set_meters_per_sec()
| float cruise_control_set_meters_per_sec | ( | int | data | ) |
Compute the cruise control desired speed.
Values of byte, 0 to 250, in km/h; converted to m/sec to agree with units used by AVCS programs. Values of byte from 251 to 255 indicate errors, returned as negative.
This is used in CCVS-formatted messages.
- Parameters
-
data one-byte value
- Returns
- speed (m/s)
◆ current_0_to_250amp()
| float current_0_to_250amp | ( | int | data | ) |
Compute a current value between 0-250 A.
Values of byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 250 in amperes.
This is used by VEP-formated J1939 messages.
- Parameters
-
data one-byte value
- Returns
- current (A)
◆ current_m125_to_p125amp()
| float current_m125_to_p125amp | ( | int | data | ) |
Compute a current value between -125 to 125 A.
Values of byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 250 scale to -125 to +125 amperes.
This is used by VEP-formated J1939 messages.
- Parameters
-
data one-byte value
- Returns
- current (A)
◆ distance_in_km()
| float distance_in_km | ( | unsigned int | data | ) |
Compute the distance traveled from input data.
Upper byte values from 251 to 255 indicate errors, stored as negative. Range from 0 to 4211081215 corresponds to 0 to 526,385,151.875 km
- Parameters
-
data four-byte value
- Returns
- distance (km)
◆ fuel_economy_meters_per_cm3()
| float fuel_economy_meters_per_cm3 | ( | int | data | ) |
Compute the fuel efficiency from input data bytes.
Values of upper byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 64555 corresponds to 0 to 128.498 meters/cubic centimeter
- Parameters
-
data two-byte value
- Returns
- efficiency (m/cm^3)
◆ fuel_rate_cm3_per_sec()
| float fuel_rate_cm3_per_sec | ( | int | data | ) |
Compute the fuel rate.
Values of upper byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 64255 corresponds to 0 to 3212.75 liters/hour or 0 to 892.430 cubic centimeters per second.
- Parameters
-
data two-byte value
- Returns
- fuel rate (cm^3/s)
◆ gain_in_kp()
| float gain_in_kp | ( | int | data | ) |
Compute the gain.
Values of byte from 251 to 255 indicate errors, returned as negative. Range of 0 to 50.2% reference engine torque/RPM.
- Parameters
-
data one-byte value
- Returns
- gain
◆ gear_m125_to_p125()
| int gear_m125_to_p125 | ( | int | data | ) |
Compute the gear percentage from input data.
Values of 251 indicates park. Values 252 to 255 indicate errors, returned as negative. Range from 0 to 250 corresponds to -125 to 125 range of return values
This is used by ETC2-formatted messages.
- Parameters
-
data one-byte value
- Returns
- percentage value
◆ gear_ratio()
| float gear_ratio | ( | int | data | ) |
Compute the gear ratio from input data.
Hibyte values from 251 to 255 indicate errors, stored as negative. Range from 0 to 64255 corresponds to 0 to 64.255 range of return values
- Parameters
-
data two-byte value
- Returns
- gear ratio
◆ hr_distance_in_km()
| float hr_distance_in_km | ( | unsigned int | data | ) |
Compute the distance traveled from input data.
Upper byte values from 251 to 255 indicate errors, stored as negative. Range from 0 to 4,211,081,215 corresponds to 0 to 21,055,406.075 km
- Parameters
-
data four-byte value
- Returns
- distance (km)
◆ mass_flow()
| float mass_flow | ( | int | data | ) |
Compute the estimated mass flow from input data bytes.
Values of high byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 64255 scale to 0 to 3212.75 kg/h.
This is used by EI-formated J1939 messages.
- Parameters
-
data two-byte value
- Returns
- mass flow (kg/h)
◆ percent_0_to_100()
| float percent_0_to_100 | ( | int | data | ) |
Compute a percentage value between 0-100% from input data.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to 0 to 100% range of return values
- Parameters
-
data one-byte value
- Returns
- percent value
◆ percent_0_to_250()
| float percent_0_to_250 | ( | int | data | ) |
Compute a percentage value between 0-250% from input data.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to 0 to 250% range of return values
- Parameters
-
data one-byte value
- Returns
- percent value
◆ percent_m125_to_p125()
| float percent_m125_to_p125 | ( | int | data | ) |
Compute a percentage value between -125 to 125% from input data.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to -125 to 125% range of return values
- Parameters
-
data one-byte value
- Returns
- percent value
◆ power_in_kw()
| float power_in_kw | ( | int | data | ) |
Compute the estimated break power from input data bytes.
Values of high byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 64255 scale to 0 to 32127.5 kW.
This is used by EI-formated J1939 messages.
- Parameters
-
data two-byte value
- Returns
- power (kW)
◆ pressure_0_to_1000kpa()
| float pressure_0_to_1000kpa | ( | int | data | ) |
Compute a pressure value between 0-1000 kPa.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to 0 to 1000 kilopascals pressure
- Parameters
-
data one-byte value
- Returns
- pressure (kPa)
◆ pressure_0_to_125kpa()
| float pressure_0_to_125kpa | ( | int | data | ) |
Compute a pressure value between 0-125 kPa.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to 0 to 125 kilopascals pressure
- Parameters
-
data one-byte value
- Returns
- pressure (kPa)
◆ pressure_0_to_12kpa()
| float pressure_0_to_12kpa | ( | int | data | ) |
Compute a pressure value between 0-12 kPa.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to 0 to 12.5 kilopascals pressure
- Parameters
-
data one-byte value
- Returns
- pressure (kPa)
◆ pressure_0_to_4000kpa()
| float pressure_0_to_4000kpa | ( | int | data | ) |
Compute a pressure value between 0-4000 kPa.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to 0 to 4000 kilopascals pressure
- Parameters
-
data one-byte value
- Returns
- pressure (kPa)
◆ pressure_0_to_500kpa()
| float pressure_0_to_500kpa | ( | int | data | ) |
Compute a pressure value between 0-500 kPa.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to 0 to 500 kilopascals pressure
- Parameters
-
data one-byte value
- Returns
- pressure (kPa)
◆ pressure_m250_to_p252kpa()
| float pressure_m250_to_p252kpa | ( | int | data | ) |
Compute a pressure value between -250 to 252 kPa.
Hibyte values from 251 to 255 indicate errors, stored as negative. Range from 0 to 64255 corresponds to -250 to 251.96 kilopascals pressure
- Parameters
-
data two-byte value
- Returns
- pressure (kPa)
◆ rotor_speed_in_rpm()
| float rotor_speed_in_rpm | ( | unsigned short | data | ) |
Compute the rotor speed from input data.
Hibyte values from 251 to 255 indicate errors, stored as negative. Range from 0 to 64255 corresponds to 0 to 257,020 range of return values
This is used in TURBO-formatted messages.
- Parameters
-
data two-byte value
- Returns
- angular speed (RPM)
◆ speed_in_rpm_1byte()
| float speed_in_rpm_1byte | ( | int | data | ) |
Compute the distance traveled from input data.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to 0 to 2500 range of return values
- Parameters
-
data one-byte value
- Returns
- angular speed (RPM)
◆ speed_in_rpm_2byte()
| float speed_in_rpm_2byte | ( | int | data | ) |
Compute the angular speed from input data.
Values of upper byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 64255 corresponds to 0 to 8031.875 range of return values
- Parameters
-
data two-byte value
- Returns
- speed (RPM)
◆ temp_m273_to_p1735()
| float temp_m273_to_p1735 | ( | int | data | ) |
Get a temperature value between -273 to 1735.
Values of byte from 251 to 255 indicate errors, returned as negative. Range of -273 to +1735 degrees Celsius. Since -251 to -255 in allowed range, multiply error indicators by 10 before subtracting from 0.
- Parameters
-
data two-byte value
- Returns
- temperature (deg C)
◆ temp_m40_to_p210()
| float temp_m40_to_p210 | ( | int | data | ) |
Get a temperature value between -40 to 210.
Values of byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 250 scale to -40 to +210 degrees Celsius.
- Parameters
-
data one-byte value
- Returns
- temperature (deg C)
◆ time_0_to_25sec()
| float time_0_to_25sec | ( | BYTE | data | ) |
Compute the time.
Values of byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 250 scale to 0 to 25 seconds.
- Parameters
-
data one-byte value
- Returns
- time (s)
◆ torque_in_nm()
| float torque_in_nm | ( | unsigned short | data | ) |
Compute the torque.
Values of upper byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 64255 Nm
- Parameters
-
data two-byte value
- Returns
- torque (Nm)
◆ voltage()
| float voltage | ( | int | data | ) |
Compute the voltage from input data bytes.
Values of byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 250 scale to 0 to 3212.75 V.
This is used by VEP-formated J1939 messages.
- Parameters
-
data two-byte value
- Returns
- voltage (V)
◆ wheel_based_mps()
| float wheel_based_mps | ( | int | data | ) |
Compute wheel-based meters per second.
Values of upper byte, 0 to 250, in km/h; values of lower byte, 0 to 255. Scaled by 1/256 to give fraction of km/h. Converted to m/sec to agree with units used by AVCS programs. Values of upper byte from 251 to 255 indicate errors, returned as negative. Range from 0 to 69.721 meters/sec.
- Parameters
-
data two-byte value
- Returns
- speed (m/s)
◆ wheel_based_mps_relative()
| float wheel_based_mps_relative | ( | int | data | ) |
Compute the relative wheel-based meters per second.
Values from 251 to 255 indicate errors, stored as negative. Range from 0 to 250 corresponds to -2.170 to +2.170 meters/sec
- Parameters
-
data one-byte value
- Returns
- relative speed (m/s)
