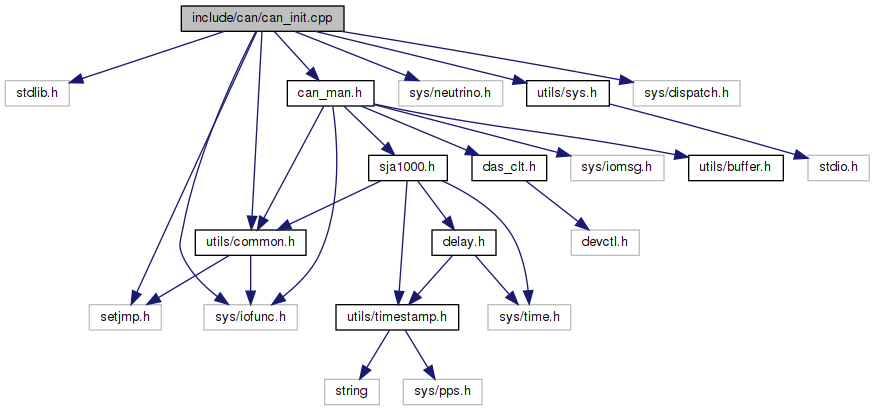
#include <stdlib.h>#include <setjmp.h>#include <sys/neutrino.h>#include "utils/common.h"#include "utils/sys.h"#include "can_man.h"#include <sys/iofunc.h>#include <sys/dispatch.h>
Include dependency graph for can_init.cpp:
Functions | |
| int | can_handle_interrupt (message_context_t *ctp, int code, unsigned flags, void *ptr) |
| void | pulse_init (dispatch_t *dpp, can_attr_t *pattr) |
Detailed Description
Function Documentation
◆ can_handle_interrupt()
| int can_handle_interrupt | ( | message_context_t * | ctp, |
| int | code, | ||
| unsigned | flags, | ||
| void * | ptr | ||
| ) |
Process and respond to interrupt events from the CAN card.
When pulse is received by the resource manager as a result of the InterruptAttachEvent in pulse_init the device-specific routine can_dev->interrupt() is called to reset any interrupt registers, etc.
Furthermore, any event registered by the client with can_arm is delivered to the client, who will then do a read to get the data that has been copied into the message buffer.
- Parameters
-
ctp dummy variable code dummy variable flags dummy variable ptr pointer to the device attributes object
- Returns
- 0 for success, or -1 if an error occurs
