
About Me
I'm a Software Engineer at Google advancing the state-of-the-art in
recommendation systems for video quality at YouTube. At Google, I've
also served as a Researcher working on problems involving geospatial
modeling and network-level optimization of urban transportation
networks.
Prior to this, I received my Ph.D. at the University of California,
Berkeley under the mentorship of Prof.
Alexandre M. Bayen,
in which I explored methods for efficiently adapting deep
reinforcement learning to the problem of
mixed-autonomy traffic.
During this period, I took part in the first
large-scale field experiment
aimed at demonstrating the ability of intelligently designed
automated driving systems to reduce traffic congestion.
I am interested in problems that aim to adapt machine learning
techniques to new or unexplored problems, and particularly enjoy
working in interdisciplinary groups which motivate the use of modern
machine learning methods to exciting new fields.
Projects
Urban routing experiments
We demonstrate the effect of network-aware routing in navigation apps on improving network efficiency.
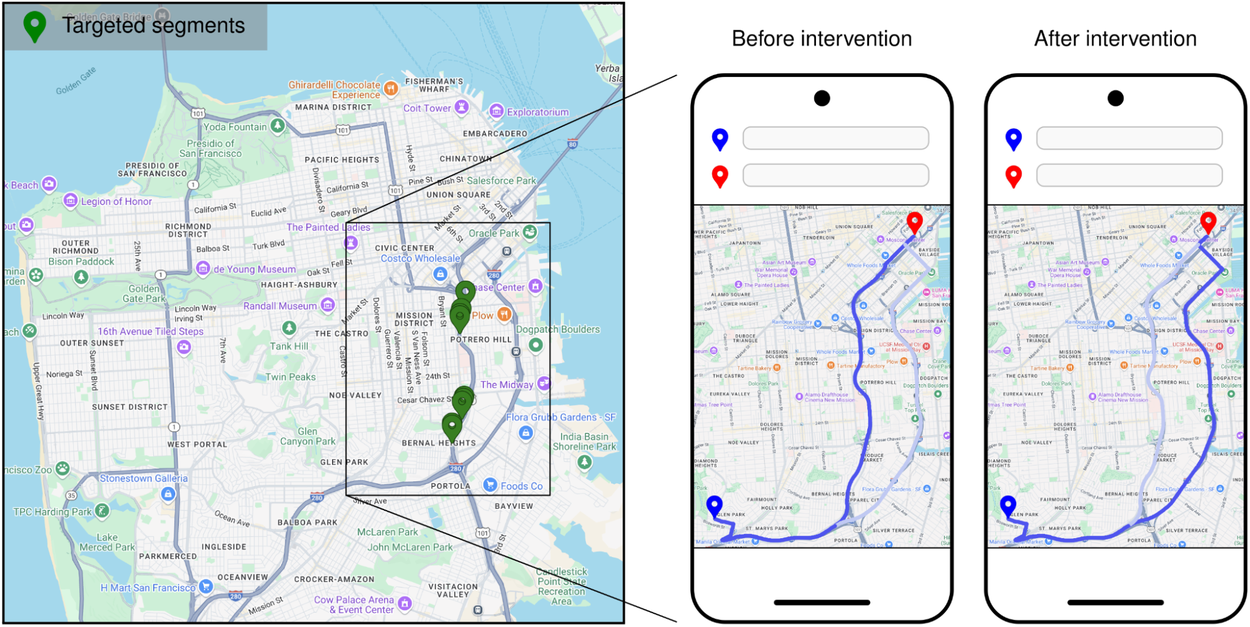
- Urban congestion relief experiments through routing-app interventions N. Arora, A. Bayen, T. Cabannes, K. Chen, A. Kreidieh, Y. Li, M. Nunkesser, P. Ramaswami, A. Tomkins, E. Turkel, S. Vasserman, H Zhang. Nature Cities, 2026 Blog
New York City congestion pricing analysis
Studying the impact of New York City's congestion pricing policy on network health and mobility.
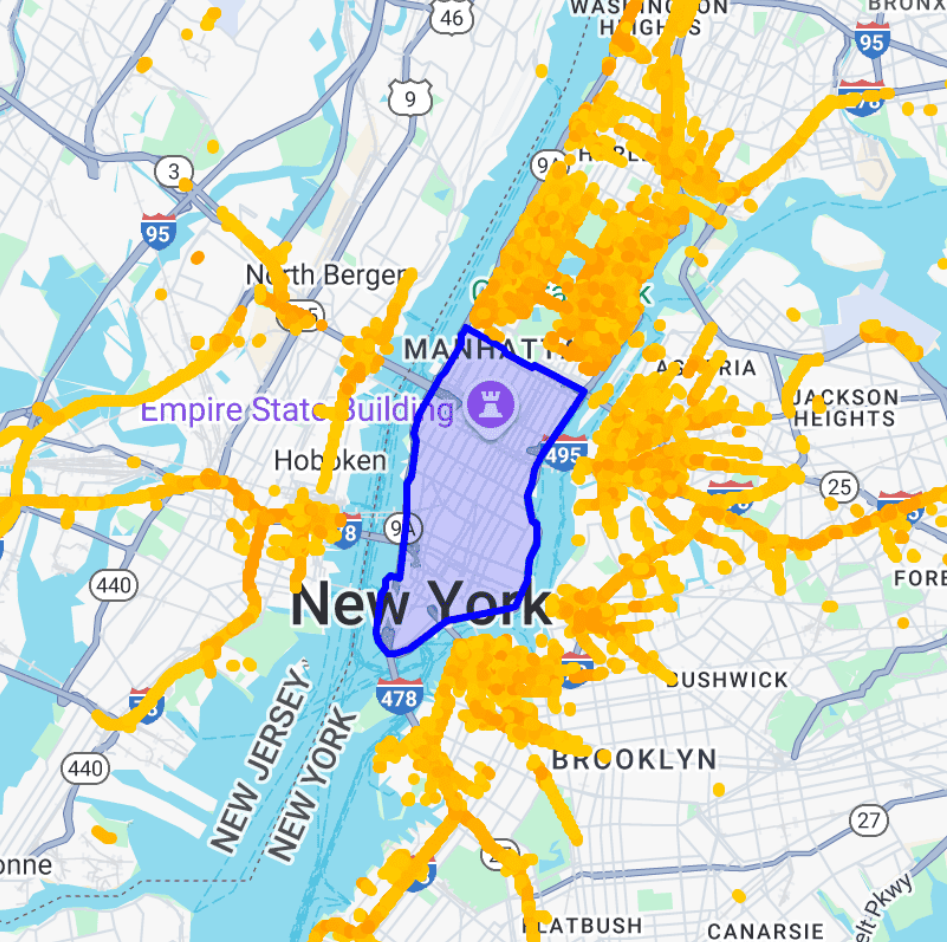
- The short-run effects of congestion pricing in New York City. C. Cook, A. Kreidieh, S. Vasserman, H. Allcott, N. Arora, F. van Sambeek, A. Tomkins, E. Turkel. NBER, 2025
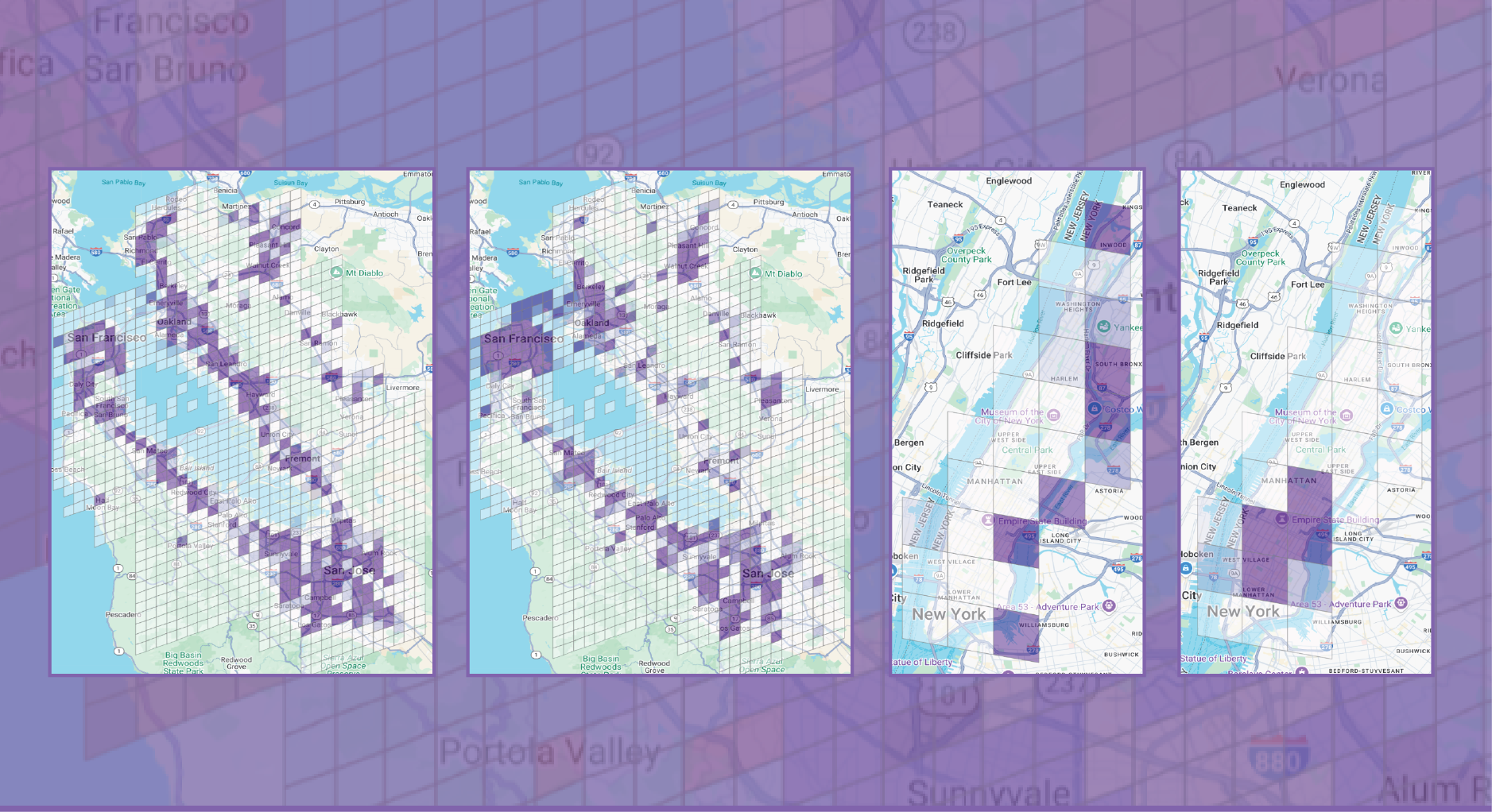
Geospatial reasoning and foundational models
Developing machine learning solutions to different geospatial problems in transportation networks.
Selected publications- S2Vec: Self-Supervised Geospatial Embeddings for the Built Environment. S. Choudhury, C. Suvarna, I. Tsogsuren, A. Kreidieh, E. Aharoni, C. Lu, N. Arora. ACM Transactions on Spatial Algorithms and Systems, 2025 Blog
- Scalable Learning of Segment-Level Traffic Congestion Functions. S. Choudhury, A. Kreidieh, I. Tsogsuren, N. Arora, C. Osorio, and A. Bayen. IEEE Conference on Intelligent Transportation Systems, 2024 Blog
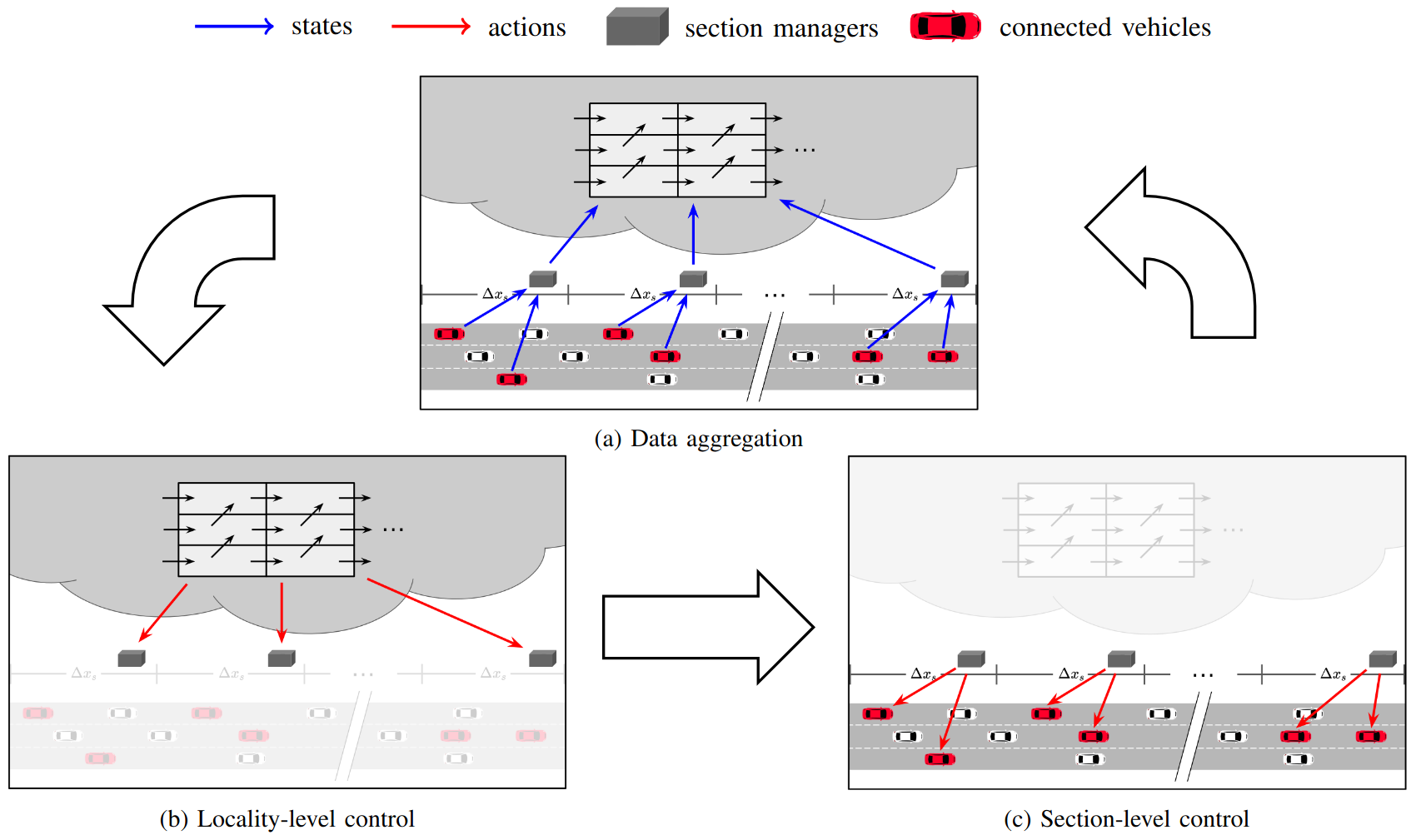
CIRCLES
We conduct a live field experiment aimed at reducing traffic jams via connected and automated vehicles.

- Traffic control via connected and automated vehicles: An open-road field experiment with 100 cavs J. Lee, H. Wang, K. Jang, A. Hayat, M. Bunting, A. Alanqary, W. Barbour, Z. Fu, X. Gong, G. Gunter, S. Hornstein, A. Kreidieh, ... and A. Bayen. IEEE Control Systems, 2025 Website
Lateral motion planning for automated vehicles
Formulating hierarchical decision-making processes for lane-assignment strategies, and learning best responses in congested regimes via reinforcement learning.
- Lane assignment of connected vehicles via a hierarchical system. A. Kreidieh, Y. Farid, and K. Oguchi. IEEE Conference on Intelligent Transportation Systems, 2022
- Lateral flow control of connected vehicles through deep reinforcement learning. A. Kreidieh, Y. Farid, and K. Oguchi. IEEE Conference on Intelligent Transportation Systems, 2022
- Non-local Evasive Overtaking of Downstream Incidents in Distributed Behavior Planning of Connected Vehicles. A. Kreidieh, Y. Farid, and K. Oguchi. IEEE Intelligent Vehicles Symposium (IV). 2021
Deep reinforcement learning for mixed autonomy traffic
Developing methods for adapting reinforcement learning to the problem of reducing traffic congestion via automated vehicles.
- Inter-Level Cooperation in Hierarchical Reinforcement Learning. A. Kreidieh, G. Berseth, B. Trabucco, S. Parajuli, S. Levine, and A. Bayen. arXiv preprint arXiv:1912.02368, 2019 Code
- Dissipating stop-and-go waves in closed and open networks via deep reinforcement learning. A. Kreidieh, and A. Bayen, 2018 IEEE conference on Intelligent Transportation Systems, Maui, HI, 2018, Page 732 Blog
Flow
A tool for simulating interactions between human-driven and autonomous agents in mixed-autonomy traffic flow settings.
- Flow: A modular learning framework for mixed autonomy traffic. C. Wu, A. Kreidieh, K. Parvate, E. Vinitsky, and A. Bayen. IEEE Transactions on Robotics, 2021 Blog Code Website
- Benchmarks for reinforcement learning in mixed-autonomy traffic. E. Vinitsky, A. Kreidieh, L. Le Flem, N. Kheterpal, K. Jang, C. Wu, F. Wu, R. Liaw, E. Liang, and A. Bayen. Conference on Robot Learning (pp. 399-409). PMLR, October 2018
News Articles

Automated Vehicles: The Answer to Our Growing Traffic Woes
WIRED
Watch just a few self-driving cars stop traffic jams
Science | AAAS


Journal Publications
- Urban congestion relief experiments through routing-app interventions N. Arora, A. Bayen, T. Cabannes, K. Chen, A. Kreidieh, Y. Li, M. Nunkesser, P. Ramaswami, A. Tomkins, E. Turkel, S. Vasserman, H Zhang. Nature Cities, 2026
- S2Vec: Self-Supervised Geospatial Embeddings for the Built Environment. S. Choudhury, C. Suvarna, I. Tsogsuren, A. Kreidieh, E. Aharoni, C. Lu, N. Arora. ACM Transactions on Spatial Algorithms and Systems, 2025
- Traffic control via connected and automated vehicles: An open-road field experiment with 100 cavs J. Lee, H. Wang, K. Jang, A. Hayat, M. Bunting, A. Alanqary, W. Barbour, Z. Fu, X. Gong, G. Gunter, S. Hornstein, A. Kreidieh, ... and A. Bayen. IEEE Control Systems, 2025
- Hierarchical speed planner for automated vehicles: A framework for Lagrangian variable speed limit in mixed-autonomy traffic. H. Wang, Z. Fu, J. Lee, H. N. Matin, A. Alanqary, D. Urieli, S. Hornstein, A. Kreidieh, R. Chekroun, W. Barbour, W. Richardson, D. Work, B. Piccoli, B. Seibold, J. Sprinkle, A. Bayen, M. Monache. IEEE Control Systems, 2025
- Kernel-based planning and imitation learning control for flow smoothing in mixed autonomy traffic. Z. Fu, A. Alanqary, A. Kreidieh, and A. Bayen. Transportation Research Part C: Emerging Technologies, 2024
- Unified Automatic Control of Vehicular Systems With Reinforcement Learning. Z. Yan, A. Kreidieh, E. Vinitsky, A. Bayen, and C. Wu. IEEE Transactions on Automation Science and Engineering, 2022
- Flow: A modular learning framework for mixed autonomy traffic. C. Wu, A. Kreidieh, K. Parvate, E. Vinitsky, and A. Bayen. IEEE Transactions on Robotics, 2021
- Multi-receptive field graph convolutional neural networks for pedestrian detection. C. Shen, X. Zhao, X. Fan, X. Lian, F. Zhang, A. Kreidieh, and Z. Liu. IET Intelligent Transport Systems, 13(9), 1319-1328, 2019
Conference Publications
- The short-run effects of congestion pricing in New York City. C. Cook, A. Kreidieh, S. Vasserman, H. Allcott, N. Arora, F. van Sambeek, A. Tomkins, E. Turkel. NBER, 2025
- Improving Social Cost in Traffic Routing with Bounded Regret via Second-Best Tolls. A. Alanqary, A. Kreidieh, S. Samaranayake, A. Bayen. IEEE 63rd Conference on Decision and Control (CDC), 4179-4186, 2024
- Towards a Trajectory-powered Foundation Model of Mobility. S. Choudhury, A. Kreidieh, I. Kuznetsov, N. Arora, C. Osorio, and A. Bayen. Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Spatial Big Data and AI for Industrial Applications, 2024
- Scalable Learning of Segment-Level Traffic Congestion Functions. S. Choudhury, A. Kreidieh, I. Tsogsuren, N. Arora, C. Osorio, and A. Bayen. IEEE Conference on Intelligent Transportation Systems, 2024
- Cooperative Driving for Speed Harmonization in Mixed-Traffic Environments. Z. Fu, A. Kreidieh, H. Wang, J. Lee, M. Monache, and A. Bayen. IEEE Intelligent Vehicles Symposium (IV). 2023
- Learning energy-efficient driving behaviors by imitating experts. A. Kreidieh, Z. Fu and A. Bayen. IEEE Conference on Intelligent Transportation Systems, 2022
- Lane assignment of connected vehicles via a hierarchical system. A. Kreidieh, Y. Farid, and K. Oguchi. IEEE Conference on Intelligent Transportation Systems, 2022
- Lateral flow control of connected vehicles through deep reinforcement learning. A. Kreidieh, Y. Farid, and K. Oguchi. IEEE Conference on Intelligent Transportation Systems, 2022
- Non-local Evasive Overtaking of Downstream Incidents in Distributed Behavior Planning of Connected Vehicles. A. Kreidieh, Y. Farid, and K. Oguchi. IEEE Intelligent Vehicles Symposium (IV). 2021
- Learning Generalizable Multi-Lane Mixed-Autonomy Behaviors in Single Lane Representations of Traffic. A. Kreidieh, Y. Zhao, S. Parajuli, and A. Bayen. International Conference on Autonomous Agents and Multiagent Systems, 2022
- Integrated Framework of Vehicle Dynamics, Instabilities, Energy Models, and Sparse Flow Smoothing Controllers. J.W. Lee, G. Gunter, R. Ramadan, S. Almatrudi, P. Arnold, J. Aquino, ... and B. Seibold. Proceedings of the Workshop on Data-Driven and Intelligent Cyber-Physical Systems (pp. 41-47), May 2021
- Continual Learning of Microscopic Traffic Models Using Neural Networks. YZ. Farid, AR. Kreidieh, F. Khaligi, H. Lobel, and A. Bayen, 100th Annual Meeting Transportation Research Board, Washington, DC, 2021
- Inter-Level Cooperation in Hierarchical Reinforcement Learning. A. Kreidieh, G. Berseth, B. Trabucco, S. Parajuli, S. Levine, and A. Bayen. arXiv preprint arXiv:1912.02368, 2019
- Guardians of the Deep Fog: Failure-Resilient DNN Inference from Edge to Cloud. A. Yousefpour, S. Devic, B. Nguyen, A. Kreidieh, A. Liao, A. Bayen, and J. Jue, AIChallengeIoT’19: Proceedings of the First International Workshop on Challenges in Artificial Intelligence and Machine Learning for Internet of Things, pp. 25-31, New York, USA, Nov. 2019
- Lagrangian Control through Deep-RL: Applications to Bottleneck Decongestion. E. Vinitsky, K. Parvate, A. Kreidieh, C. Wu, Z. Hu and A. Bayen, IEEE Intelligent Transportation Systems Conference (ITSC), 2018
- Dissipating stop-and-go waves in closed and open networks via deep reinforcement learning. A. Kreidieh, and A. Bayen, 2018 IEEE conference on Intelligent Transportation Systems, Maui, HI, 2018, Page 732
- Benchmarks for reinforcement learning in mixed-autonomy traffic. E. Vinitsky, A. Kreidieh, L. Le Flem, N. Kheterpal, K. Jang, C. Wu, F. Wu, R. Liaw, E. Liang, and A. Bayen. Conference on Robot Learning (pp. 399-409). PMLR, October 2018
- Flow: Deep reinforcement learning for control in sumo. N. Kheterpal, K. Parvate, C. Wu, A. Kreidieh, E. Vinitsky, and A. Bayen. EPiC Series in Engineering, 2, 134-151, 2018
- Emergent behaviors in mixed-autonomy traffic. C. Wu, E. Vinitski, A. Kreidieh and A. Bayen, Conference on Robot Learning, 2017
- Multi-lane Reduction: A Stochastic Single-lane Model for Lane Changing. C. Wu, E. Vinitsky, A. Kreidieh and A. Bayen, IEEE Conference on Intelligent Transportation Systems, Apr. 2017
Workshops / Tutorials
Lagrangian Control for Traffic Flow Smoothing in Mixed Autonomy Settings
Organizers:
Alexandre Bayen, George J. Pappas, Benedetto Piccoli, Daniel B. Work, Jonathan Sprinkle, Maria Laura Delle
Monache, Benjamin Seibold, Cathy Wu, Abdul Rahman Kreidieh, Eugene Vinitsky, Yashar Zeiynali Farid
Time and Location: Conference of Decision-Making and Control (CDC), 2019
Webpage:
https://cdc2019.ieeecss.org/workshops.php
| Session | Title |
|---|---|
| 1 | Means Field Models |
| 2 | Deep Reinforcement Learning (RL) |
| 3 | Verification of Deep Neural Networks (DNNs) |
Tutorial on Deep Reinforcement Learning and Transportation
Organizers: Alexandre Bayen, Cathy Wu, Abdul Rahman Kreidieh, Eugene Vinitsky
Time and Location: IEEE International Conference on Intelligent Transportation Systems (ITSC), 2018
Webpage: https://ieee-itsc.org/2018/tutorials.html
| Session | Title | Slides |
|---|---|---|
| 1 | Welcome, opening remarks | Download |
| 2.a | Reinforcement learning | Download |
| 2.b | Q learning | Download |
| 3.a | Policy gradient methods | Download |
| 3.b | Non-policy gradient methods | Download |
| 4 | Deep RL from a transportation lens (model-based RL and inverse RL) | Download |
| 5.a | Tools of the trade (SUMO) | Download |
| 5.b | Tools of the trade (Flow) | Download |
| 5.c | Tools of the trade (Ray RLlib) | Download |
| 6 | Hands-on tutorial on //Flow | Download |
| 7 | Advanced topics in deep reinforcement learning (multi-agent RL, representation learning) | Download |
Teaching
EE290O | Deep multi-agent reinforcement learning with applications to autonomous traffic
Organizers: Alexandre Bayen, Eugene Vinitsky, Aboudy Kreidieh, Yashar Zeiynali Farid, Cathy Wu
Time and Location: University of California, Berkeley, Fall 2018
Webpage:
https://flow-project.github.io/EE290O/
Lecture / Homework Notebooks:
https://github.com/flow-project/EE290O
E7 | Intro to Computer Programming for Scientists and Engineers
Time and Location: University of California, Berkeley, Spring 2017
- Led lab sessions consisting of around 20 students and mentored their development.
- Formulated homework and exam problems in Matlab.